
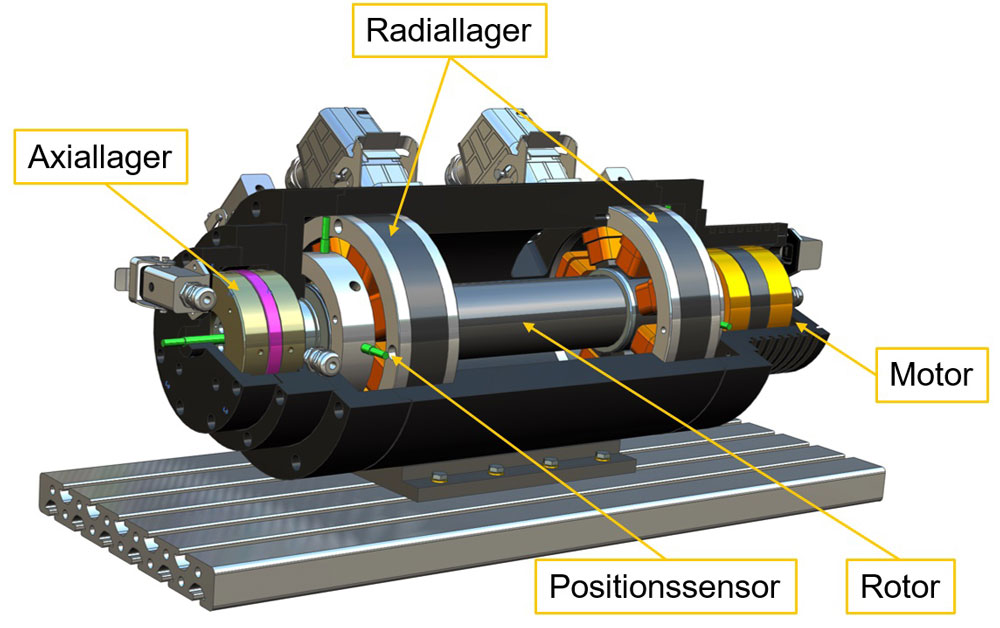
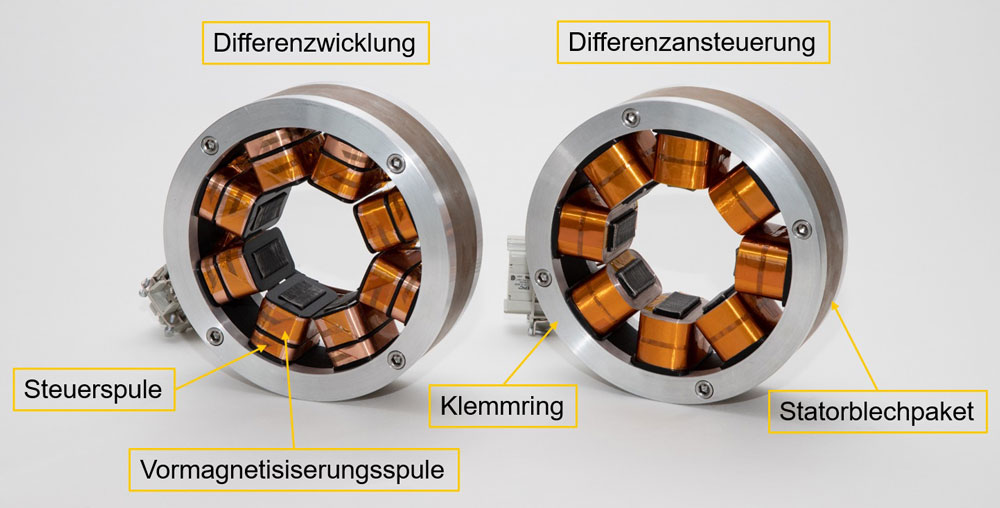
Der Prüfstand besteht aus den mechanischen Komponenten der Spindel sowie der Leistungselektronik in Form des Magnetlagerverstärkers sowie des Motorumrichters. Der Rotor des Prüfstands ist aus vergütetem Stahl gefertigt. Die Sensorspur und die Blechpakete der Magnetlager sind auf diesen aufgeschrumpft und bilden somit eine Einheit. Der Stator besteht aus den Magnetlagern, den Positionssensoren und der Antriebseinheit. Durch den modularen Aufbau können verschiedene Lagervarianten in Form von Differenzansteuerung und Differenzwicklung sowie verschiedene Magnetlagermaterialien in dem Prüfstand für die Eignung zur Selbstsensierung untersucht werden.
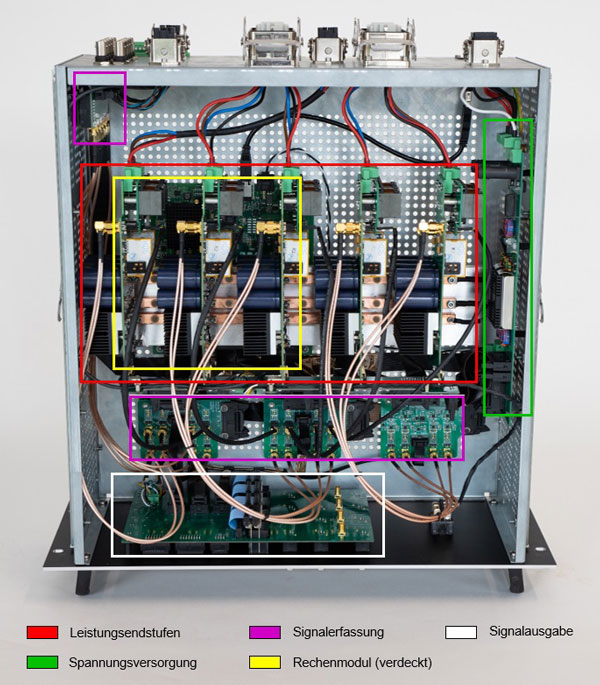
Angesteuert werden die Magnetlager mittels Pulsweitenmodulation. Dazu hat die Magnetlagerendstufe 10 Leistungsverstärker, die jeweils eine Ausgangsspannung von 48V und einen Ausgangsstrom von bis zu 12 A stellen können. Die Berechnung der Pulsweite wird über ein FPGA durchgeführt. Für die Selbstsensierung ist an den Endstufen zusätzlich ein Signaltransformator verbaut, über den die Stromsteigung in den Magnetlagerspulen, die zur Schätzung der Position notwendig ist, in ein Spannungssignal gewandelt wird. Dadurch ist auch der Betrieb ohne Positionssensoren möglich. Um die Güte des geschätzten Positionssignals zu bestimmen sind dennoch Positionssensoren verbaut. Mit diesen können Vergleiche zwischen einer konventionellen Positionserfassung und dem selbstsensierenden Betrieb durchgeführt werden. Als Antriebseinheit ist ein permanenterregter Synchronmotor verbaut, mit dem kurzzeitig bis zu 16.000 U/min und dauerhaft 10.000 U/min erreicht werden.
Durch den modularen Aufbau der Spindel sowie der eigens entwickelten Magnetlagerendstufe können Untersuchungen zu verschiedenen Lagervarianten und Materialien durchgeführt werden. Ziel ist es, die Güte des Schätzsignals zu verbessern sowie Einflussfaktoren auf das Schätzsignal durch Verwendung verschiedener Materialien zu bestimmen. Neben den mechanischen Komponenten kann auch das Schätzverfahren untersucht und Parameter angepasst werden, um das Schätzsignal zu verbessern. Durch die vorhandenen Vergleichssensoren können zudem neue Regelungsansätze sowohl für konventionelle Lager als auch für selbstsensierende Lager erprobt werden.