
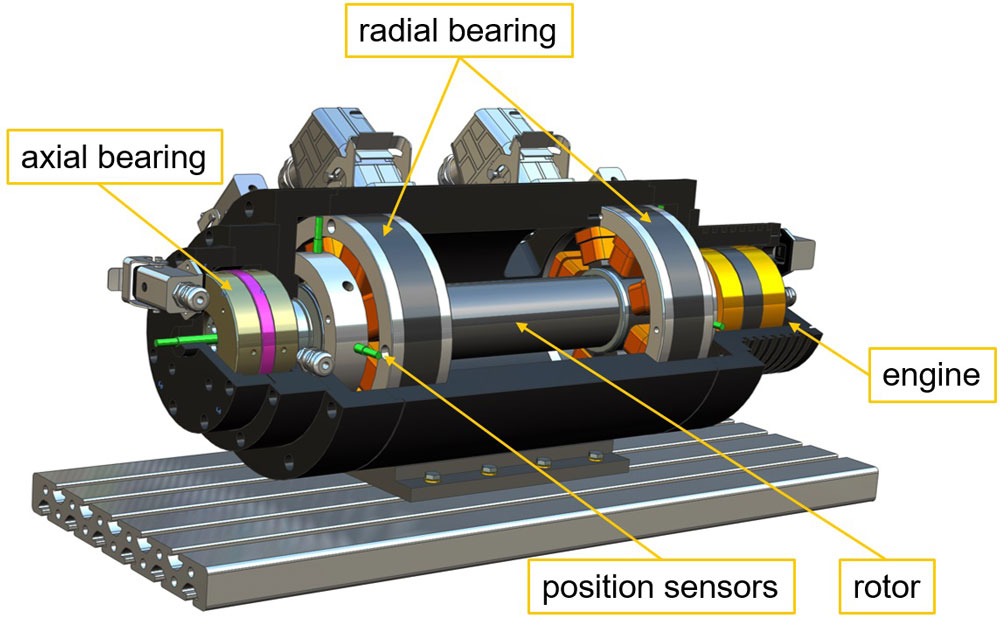
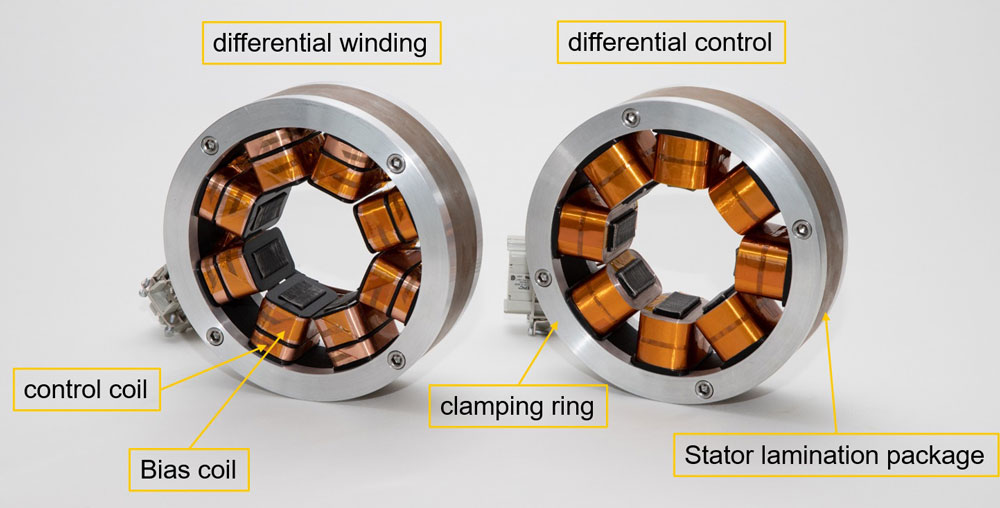
The test bench consists of the mechanical components of the spindle as well as the power electronics in the form of the output stage and the motor converter. The rotor of the test rig is made of tempered steel. The sensor target and the lamination packs of the magnetic bearings are shrunk onto it and thus form a unit. The stator consists of the magnetic bearings, the position sensors and the drive unit. Due to the modular design, different bearing variants in the form of differential control and differential winding as well as different magnetic materials can be tested in the test rig for their suitability for self-sensing.
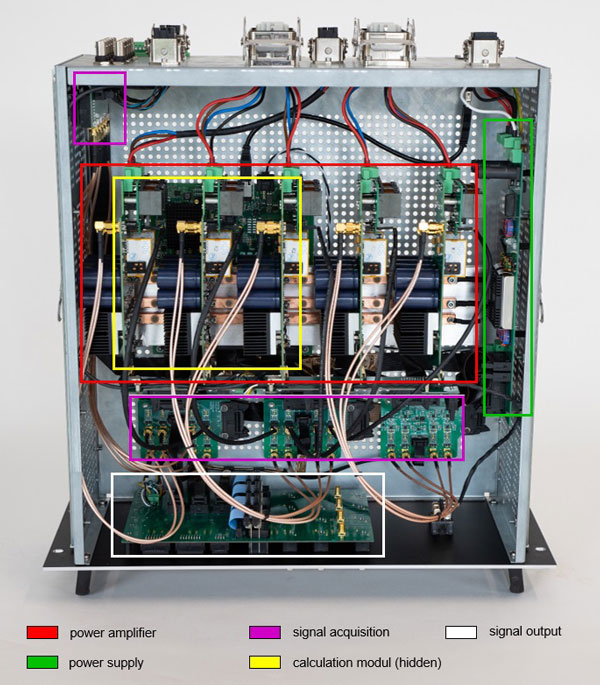
The magnetic bearings are controlled by pulse width modulation. For this purpose the power electronics has 10 power amplifiers, each of which can provide an output voltage of 48 V and an output current up to 12 A. The calculation of the pulse width is done by a FPGA. For self-sensing, a transformer is additionally installed at the power amplifiers, via which the current gradient in the magnetic bearing coils, which is necessary for the position estimation, is converted into a voltage signal. This also allows operation without position sensors. To determine the quality of the estimated position signal, position sensors are nevertheless installed. With these sensors comparisons between conventional position detection and self sensing operation can be made. The drive unit is a permanently excited synchronous motor with which up to 16,000 rpm can be reached for short periods and 10,000 rpm for long periods.
Due to the modular design of the spindle as well as the specially developed magnetic bearing amplifier, investigations on different bearing variants and materials can be carried out. The aim is to improve the quality of the estimation signal and to determine factors influencing the estimation signal by using different materials. In addition to the mechanical components, the estimation procedure can be investigated and parameters can be adjusted to improve the estimation signal. In addition, new control approaches for both conventional bearings and self-sensing bearings can be tested.