
The consideration of active measures already at the beginning of the product development phase does not only have the potential of replacing passive measures, but additionally results in the possibility of generating an improved overall system behavior. This can be reflected on costs, weight and efficiency: on the one hand passive measures are discarded and on the other hand tasks can be effectively fulfilled by active systems, thus allowing for reduced requirements for the design of the basic passive system.
The knowledge about the basic passive system is the most important factor for the development of an active system, when aiming for an optimal solution of a specific problem. That is why the research group Actuated Systems focuses on fundamental research regarding system theory knowledge besides their activities on active measures. This covers for example the description of vibrations in gearboxes and rotors, and identifying excitation sources and their influence on fatigue or failure. Throughout the consideration of the gained overall system knowledge within the design process and the control of an actuated system, a more efficient and performant system can be obtained compared to using standard methods.
Piezo bearings
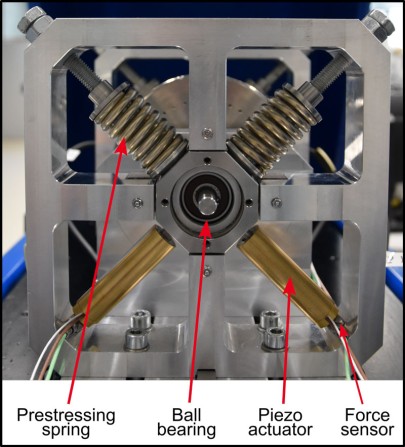
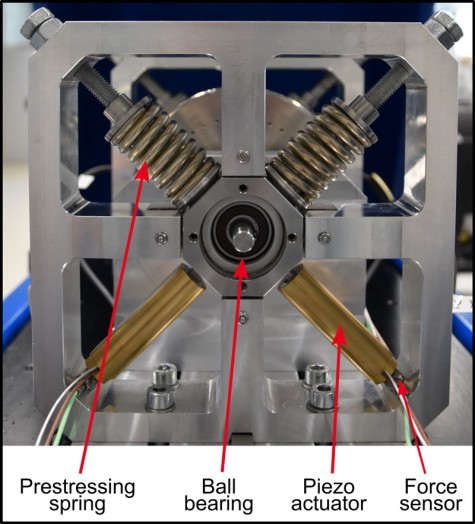
Piezo bearings are using piezoelectric actuators, which can shift the rotor highly dynamically. This leads to a change of dynamics of the rotor system. The general structure of an active rotor is depicted here. The actuators are kept in place during operation using prestressing springs. The bearing forces are measured with sensors at the actuators locations (collocated) and are used for different control approaches.
Different control approaches are investigated at IMS for piezo bearings. The most challenging part is the change of system properties during operation, which is caused by strong gyroscopic effects.
Current Projects:
Atalante – Active piezoelectric bearing with rotating actuators
Finished Projects:
AMOS – Analytic methods for optimal vibration reduction of general rotors
Magnetic Bearings
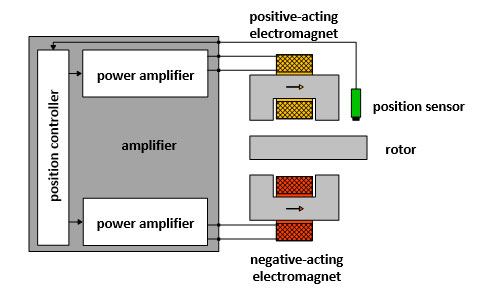
In active magnetic bearings, electromagnets are used to support the rotor without contact. Compared to conventional roller and friction bearings, these have the advantage that they operate without friction, wear and lubricant. They also require little maintenance and are suitable for very high speeds. The structure of such bearings essentially consists of an electromagnet, the rotor, the sensors for position detection and the control and power electronics. To prevent damage to the system in the event of bearing failure, safety bearings are also required.
